ARTIFICIAL MUSCLE TWISTER




ARTIFICIAL MUSCLE TWISTER
Published 2017-07-04T12:32:13+00:00
ARTIFICIAL MUSCLE TWISTER
Designed by Aleksandr Semochkin | Released under CC BY-SA 4.0
This project explains how to build a device that manufactures these artificial muscles, enabling anyone to make samples of muscles with identical characteristics.
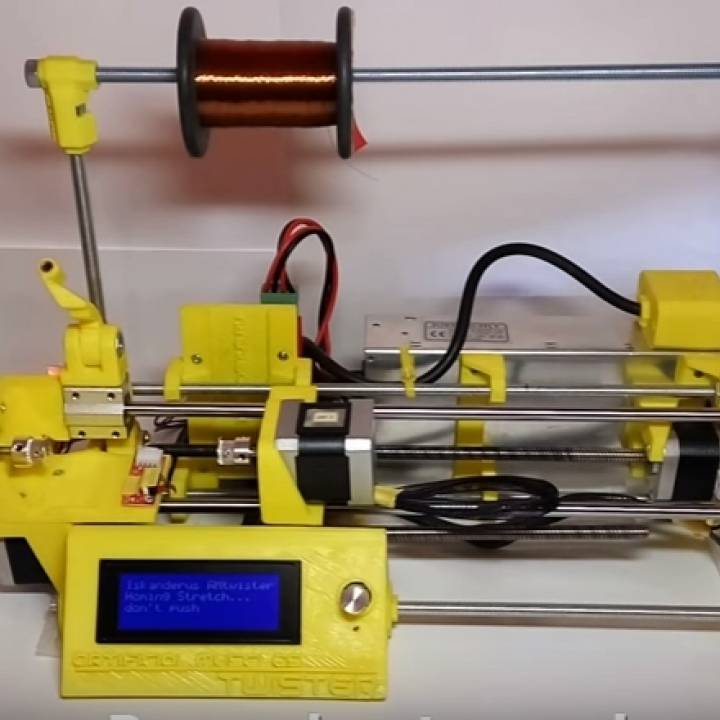
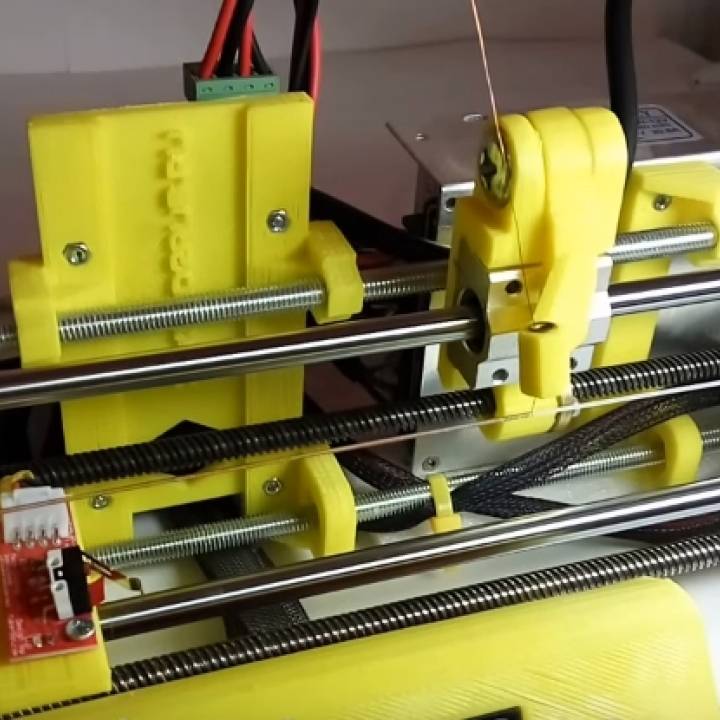
The project introduces the Artificial Muscle Twister, a machine used for producing artificial muscles from nylon fishing line with a heater wire. The machine is assembled from common electronic and mechanical components, while the case is 3D printed.
The machine twists wire onto a nylon mono-filament creating coiled threads that form helical springs. My supporting research paper presents the main characteristics of the muscle samples created by the machine, differing in source fiber diameter and process of manufacturing.
The artificial muscles are actuated by applying voltage to the wire wound around the nylon fiber through the MOSFET keys of the 12 volt power supply. The Artificial Muscle Twister can be used in small-scale production of artificial muscles in research and practical use. The assembly and operation circuit, as well as the 3D models are available under an open source license.
The supporting research paper was presented at the IEEE International Symposium on Assembly and Manufacturing collocated with 12th Conference on Automation Science and Engineering 2016, Fort Worth, Texas, USA.
Type 1 - Entire polymer fiber twisted into a tight helical spring (auto-coiling process).

This is a "homochiral" or contracting muscle.
Type 2 - Polymer fiber twisted until the formation of coils and wound on a rod (Mandrel coiling process).

This is a "homochiral" or contracting muscle.

This is a "heterochiral" or expanding muscle.
All descriptions, instructions, source code, and 3D models also available on my website.
Additional Links & Resources:
http://iskanderus.ru
http://lit.bgpu.ru
https://www.facebook.com/iskanderuse
https://www.youtube.com/user/Iskanderuse



| Date published | 04/07/2017 |
| Technology | FDM |
| Complexity | Difficult |